The PLC Technician II Certificate program provides a more advanced study of PLCs in manufacturing including Distributed Control Systems (DCS), Supervisory Control and Data Acquisition Systems (SCADA) and advanced programming languages.
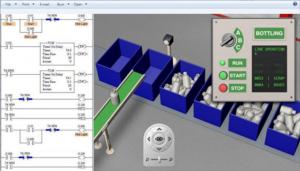
The program includes PLCLogix 5000, our lab simulator based on the Studio 5000/RSLogix 5000 programming applications. It enables you to design, run, test and debug ladder logic programs and simulate the operation of real-world PLC components.
This module provides a general overview of the characteristics of advanced PLCs and their role in industry. The operation of deterministic systems and relational databases are described, and the advantages of using PLC languages based on the IEC-61131-3 standard are discussed. The differences between PLCs, PACs, and PCs are presented within the context of industrial automation and manufacturing. An introduction to Studio 5000 PLCs tag-based addressing is presented, and the benefits of simulation of advanced PLCs are described.
Learning Outcomes:
Upon completion of this module the student will be able to:
- Name three characteristics of advanced PLCs
- Describe the purpose of a relational database
- Differentiate between scan times and ISRs
- Explain the operation of a deterministic system
- Describe the basic operation of a PAC
- List the main differences between a PLC, a PAC and a PC
- List the main differences between a PLC and a PAC
- Name the four PLC languages in the IEC-61131-3 standard
- Describe the principles of PLC cyber security
- Differentiate between address-based and tag-based PLCs
- Explain the purpose of a Safety PLC
- List three benefits of PLC simulation
This module is intended to familiarize the student with the most important aspects of the PLC's central processing unit with a focus on the ControlLogix processor. Topics covered in the module include memory devices, memory storage, and data processing as well as an introduction to tag-based memory. In addition to covering memory utilization and protection, the module also provides detailed information on multiprocessing and PLC scan functions.
Learning Outcomes:
Upon completion of this module the student will be able to:
- Explain the difference between a CPU and a MPU.
- Name the four basic functions of a CPU.
- Differentiate between volatile and nonvolatile memory.
- Define "flash memory".
- Describe the main purpose of the scan cycle in a PLC.
- Name two types of PLC memory protection.
- List the major features of Controllogix controllers.
- Explain the purpose of tag-based memory
- Describe the difference between a project and a task.
This module covers all aspects of the Input/Output system for PLCs including discrete, analog, and data I/O. In addition, the module also presents an overview of I/O addressing and an introduction to Allen-Bradley I/O parameters. Module topics also include the principles of remote I/O and an introduction to scaling and resolution of analog devices and signals.
Learning Outcomes:
- Explain the purpose of the I/O system
- Describe how I/O addressing is accomplished.
- Define discrete inputs.
- List four tasks performed by an input module.
- Describe the basic operation of a discrete output.
- Explain the purpose of data I/O interfaces.
- Define analog I/O.
- Describe the resolution of an analog I/O module.
- List three applications for advanced I/O.
- Explain the purpose of remote I/O.
This module will provide the student with an introduction to dedicated and PC-based programming terminals and their application in advanced PLC systems. The module also covers software used in programming terminals and describes the basic operating principles of host computer systems. In addition, an introduction to HMI programming terminals is presented with an emphasis on PLC-based systems. Peripheral devices are also described in detail including memory storage and data transfer systems.
Learning Outcomes:
Upon completion of this module the student will be able to:
- Define the term programming terminal
- Differentiate between dedicated and PC-based programming terminals.
- Describe the purpose of mini-programmers.
- Explain the function of programming software.
- Differentiate between offline and online programming.
- Name four uses for HMIs in PLC applications.
- Describe the difference between HMI efficiency and effectiveness.
- List the main states of HMI alarms.
The purpose of this module is to provide the student with a thorough coverage of the various safety precautions, preventative maintenance, and troubleshooting techniques associated with a typical PLC system. In addition, the module also covers proper grounding techniques, sources of electrical interference, and I/O installation techniques. Field checkout and troubleshooting with an emphasis on practical troubleshooting and problem-solving strategies.
Learning Outcomes:
Upon completion of this module the student will be able to:
- List three safety precautions when installing PLC systems.
- Define system layout.
- Describe proper grounding techniques for PLCs.
- Name three precautions to avoid electrical interference.
- Define cross-talk interference.
- Explain I/O installation.
- Describe the need for I/O documentation.
- Define leakage current and explain the purpose of bleeder resistors.
- Explain the field checkout of PLC systems.
- Provide periodic maintenance for a PLC system.
- Troubleshoot advanced PLCs.
- Describe redundant PLC architecture.
- Explain the principle of fault tolerance
This module introduces the student to the fundamentals of tags and tag-based PLC programming. In addition to produced and consumed tags, the module also covers common methods for creating tags and explains the purpose of User Defined Data Types (UDTs). Theoretical areas of study include continuous and periodic tasks as well as the various types of data used in tag-based I/O systems. The principles of projects, arrays, throughput, and scope are described in detail, emphasizing practical applications and standard programming techniques.
Learning Outcomes:
Upon completion of this module the student will be able to:
- Differentiate between address-based and tag-based PLCs
- Describe the main elements of a tag
- Define the term scope and explain its purpose in a tag
- Explain the purpose of a User Defined Data Type (UDT)
- Name three types of arrays
- Define Produced and Consumed tags
- Differentiate between a continuous task and periodic task
- Explain the principles of Logix5000 I/O addressing
- Describe the four types of data used in tag-based I/O
- List three methods to increase throughput
- Explain why Add-On Instructions (AOIs) are used in PLCs.
- Describe the purpose of source protection in AOI applications.
This module provides an introduction to ladder logic programming techniques using PLCLogix PLC simulation software. PLCLogix 5000 simulation software, which is based on Rockwell’s Studio 5000/RSLogix 5000 PLC programming software. The lab component of the module provides the student with an opportunity to write ladder logic programs and test their operation through PLC simulation. Topics covered in the module include I/O instructions, safety circuitry, programming restrictions, I/O addressing, FORCE instructions and bit status flags.
Learning Outcomes:
Upon completion of this module the student will be able to:
- Define ladder logic.
- Convert relay logic schematics to ladder logic.
- Write a ladder logic program using PLCLogix.
- Define the terms examine on and examine off.
- Explain the purpose of a latching relay instruction.
- Differentiate between a branch and a nested branch.
- Describe the two basic types of controller scan.
- Differentiate between task scan time and controller scan time.
- Describe the use of Force instructions in PLC applications.
- Explain why safety circuitry is important in ladder logic systems.
- Explain the purpose of bit status flags.
This module is intended to provide students with an overview of PLC timers and their application in industrial control circuits. Studio 5000/RSLogix 5000 timing instructions such as TON, TOF, and RTO are discussed in detail and the theory is reinforced through lab projects using lab simulation software. In addition, students will learn practical programming techniques for timers including cascading and reciprocating timing circuits.
Learning Outcomes:
Upon completion of this module the student will be able to:
- Name two types of relay logic timers.
- List the four basic types of PLC timers.
- Describe the function of a time-driven circuit.
- Differentiate between an ON-delay and an OFF-delay instruction.
- Write a ladder logic program using timers.
- Describe the operating principle of retentive timers.
- Explain the purpose of cascading timers.
- Define reciprocating timers.
This module provides students with a broad overview of PLC counters and their application in control systems. Studio 5000/RSLogix 5000 counting instructions such as CTU and CTD are presented in detail and the theory is reinforced through lab projects using lab simulation software. In addition, students will learn practical programming techniques for counters including cascading counters and combining counting and timing circuits.
Learning Outcomes:
Upon completion of this module the student will be able to:
- Name two types of mechanical counters.
- Define the two basic types of PLC counters.
- Write a ladder logic program using CTU, CTD, and RES.
- Explain the terms underflow and overflow.
- Describe the function of an event-driven circuit.
- Design an up/down counter.
- Define cascading counters.
- Explain the advantages of combining timers and counters.
This module is intended to provide an overview of various branch and loop instructions including MCR, JSR and JMP. The use of PLC simulation software in this module allows the student to program and observe branching operations and to perform troubleshooting tasks. The principles of fault routines are presented with an emphasis on safety considerations and compliance with safety codes and regulations. In addition, the module also provides coverage of subroutines and their application and benefit in complex control problems. Force instructions are presented and demonstrated using PLCLogix 5000 simulation software.
Learning Outcomes:
Upon completion of this module the student will be able to:
- Define program control instructions.
- Differentiate between master control reset and relay.
- Explain the purpose of a jump instruction.
- Describe the basic operation of a subroutine
- Use a Force command for troubleshooting.
- Differentiate between a JSR and a JMP.
- Explain the purpose of fault routine.
- List the values associated with a GSV instruction.
This module is designed to provide the student with a clear understanding of the purpose and application of PLC sequencers, both through the theory of operation and through the actual demonstration using lab simulation software. The module will familiarize the learner with masking techniques and the various types of sequencers available including SQO. SQL and SQ1 instructions. In addition, sequencers charts are presented with an emphasis on maintenance and recording of sequencer chart information.
Learning Outcomes:
Upon completion of this module the student will be able to:
- Explain the operation of a mechanical drum controller.
- Describe the basic function of an advanced PLC sequencer.
- Explain how time-driven sequencers operate.
- Describe the operation of event-driven sequencers.
- Derive a sequencer chart.
- Define the term matrix.
- Explain the purpose of masking.
- List three types of sequencers used in advanced PLCs.
- Write a ladder logic program using SQO. SQL and SQ1.
This module provides students with an introduction to the principles of Studio 5000/Logix 5000 data handling, including bits, words, and arrays. Using PLCLogix 5000 simulation, various aspects of data transfer will be demonstrated and students will program and observe transfer instructions such as MOV, FIFO and LIFO. An introduction to shift registers is also presented with an emphasis on practical applications in industrial control circuits.
Learning Outcomes:
Upon completion of this module the student will be able to:
- Name the three main data handling functions.
- Differentiate between words and arrays.
- Convert data from one form to another.
- Explain the purpose of a move instruction.
- Write a ladder logic program using an MOV instruction.
- Describe the purpose of an array to array move.
- Name two types of shift registers.
- Differentiate between FIFO and LIFO instructions.
- Transfer data between memory locations.
This module provides an overview of basic and advanced mathematical functions found in the Logix 5000 PLC. It provides thorough coverage of data comparison instructions such as SQR, EQU, LES, and GRT. In addition, this module provides a foundation for more advanced programming techniques including analog input and output control. Topics such as combining math functions, averaging, scaling and ramping are presented with an emphasis on practical application and are demonstrated using PLCLogix 5000 lab simulation.
Learning Outcomes:
Upon completion of this module the student will be able to:
- Name the four main PLC mathematical functions.
- List three types of data comparison.
- Add and subtract numbers using PLC instructions.
- Write a ladder logic program using MUL and DIV instructions.
- Define the terms scaling and ramping.
- Use LES, GRT, and EQU instructions in a ladder logic program.
- Write a program using the SQR instruction.
- List three advanced math operations.
- Describe the purpose of an AVE instruction.
It is in this module that the student learns the principles of industrial control systems including open- and closed-loop control. Proportional, Integral, and Derivative control are covered with an emphasis on practical application and design. PID instructions are described in detail, and an introduction to algorithms and flow charts is also presented in this module.
Learning Outcomes:
Upon completion of this module the student will be able to:
- Define the terms process, process variable and controlled variable.
- Name four applications for control systems.
- Explain the advantage of using block diagrams.
- Describe the relationship between the set point, error signal and measured value.
- Differentiate between open-loop control and closed-loop control.
- List the five basic components in a closed-loop control system.
- Name the four variables that are generally used to evaluate the performance of a closed-loop control system.
- Define dead time.
- Explain the basic operating principles of on off, proportional, integral, derivative and PID control.
- Describe the purpose of feedforward control in process systems.
This module is intended to provide the student with an introduction to data communication using PLC systems and peripherals. The fundamentals of LANs and data communications are discussed using Windows platform and Rockwell hardware and programming software such as RSLinx. In addition, an introduction to ethernet and network switching is also presented as well as detailed descriptions of topology and the operation of token passing in a data highway. The module also provides an overview of transmission media, response time and the basic principles of proprietary networks including the seven OSI layers.
Learning Outcomes:
Upon completion of this module the student will be able to:
- Define the term data communication.
- Explain the purpose of a LAN
- Describe the term protocol and its application to PLCs.
- Differentiate between OLE and DDE.
- Name two types of topology.
- List four factors affecting transmission media.
- Define the term response time.
- Describe the basic principles of proprietary networks.
- Name the seven OSI layers.
- Differentiate between OSI and TCP/IP models
- List three advantages of using Ethernet.
- Explain the purpose of NICS, Hubs, and Switches.
- Name three types of RSLinx diagnostic resources.
This module is intended to familiarize the student with the most important aspects of Distributed Control Systems. Topics covered in the module include remote terminal units (RTUs), HMIs and an introduction to LANs. The student will also learn the differences between star, bus and ring topology and their applications in automation systems. In addition to covering system architecture and algorithms, the module also provides detailed information on practical applications for DCS. Emphasis is placed on design, problem solving and analysis of industrial automation systems.
Learning Outcomes:
Upon completion of this module the student will be able to:
- Differentiate between DCS and SCADA.
- List the three main elements in a DCS.
- Identify the difference between uptime and system latency.
- Explain the purpose of a remote terminal unit (RTU).
- Define task architecture and hardware architecture.
- Describe the reason why algorithms are popular in DCS.
- Name four common uses for HMI in DCS applications.
- Explain the principles of DCS communication.
- Identify three components of quality of use in HMI.
- Differentiate between, suppressed, nuisance and cascading alarms.
- Compare software-based alarms with hardware-based alarms.
- List five applications for DCS.
- Name the four elements in a typical OTS.
- Explain the primary benefit of DCS simulation
This module is intended to provide the student with an introduction to SCADA using automation systems and peripherals. The principles of alarm management are presented along with an overview of the alarm management lifecycle and an introduction to Six Sigma. SCADA security and authentication methodologies are also discussed in detail. Practical examples of SCADA applications are presented and include a discussion of SCADA simulation techniques.
Learning Outcomes:
Upon completion of this module the student will be able to:
- Describe the basic function of a SCADA system.
- List four examples of SCADA systems.
- Define SCADA architecture.
- Identify seven elements in a SCADA system.
- Explain the purpose of alarm management.
- Identify three types of changes noted by alarms and events.
- List the 10 stages of an alarm management lifecycle.
- Describe how Six Sigma is applied to alarm management.
- Explain the purpose of a firewall in a SCADA system.
- Define the term SCADA security.
- Name the two most common authentication methodologies.
- Describe the benefits of SCADA simulation.
This module provides students with an introduction to advanced PLC programming languages which are widely used in industrial automation. In addition, this module also provides an introduction to C and C++ high level programming languages. Numerous programming examples are discussed usin g real-world applications and problem-solving techniques. This module also provides an overview of the Studio 5000/RSLogix 5000 programming language and controller organizer, including tagnames, alias tags, and various editors (Structured Text (ST), Function Block Diagram (FBD), Sequential Function Chart (SFC), etc.).
Learning Outcomes:
Upon completion of this module the student will be able to:
- Explain the purpose of the IEC61131-3 programming standard and its application in industry.
- Name two text-based languages and three graphical languages.
- Describe the basic programming and operating characteristics of Sequential Function Chart (SFC).
- List the three main parts of a function and explain their application in Function Block Diagrams (FBD).
- Write a simple Structured Text (ST) program.
- Differentiate between Instruction List (IL) programming and ST.
- Define online editing.
- List the four programming languages used by Studio 5000/RSLogix 5000.
- Describe the purpose of the Controller Organizer in Studio 5000/RSLogix 5000.
- Explain why C and C++ are popular in industrial control applications.
- Name the five basic components of a C program.
This module provides an in-depth look at the industrial robot and the role it plays in industrial manufacturing processes. The origins of the industrial robot and its evolution are described. The types, components, accuracy, programming and applications of robots, among other topics, are thoroughly analyzed. Robot sensors, including vision and tactile detection are covered with an emphasis on practical application. This module also provides an overview of safety considerations including fail-safe operation and work-envelope design. The concept of Artificial Intelligence and how it relates to industrial machines is presented in detail.
Learning Outcomes:
Upon completion of this module the student will be able to:
- Define a robot
- Name the three general classifications of robots
- Describe the basic principle of a teach pendant
- Differentiate between a control system and a manipulator
- List the degrees of freedom for a four-axis robot
- Differentiate between pitch, yaw, and roll
- Define the term work envelope
- Name the three basic coordinate systems
- Explain the main differences between PUMA- and SCARA-style robots
- Define, payload, repeatability, and accuracy
- List five functions performed by vision and touch sensors
- Explain how collision protection provides for human safety
- Name six applications for industrial robots
- Define artificial intelligence